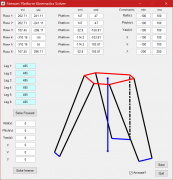
將Stewart平臺(tái)鉸接點(diǎn)參數(shù)帶入到上述公式中,使用MATLAB求得在初始位姿下,如圖2.22.1所示,六根桿長(zhǎng)和設(shè)計(jì)時(shí)...
2019-10-18

2019-10-18
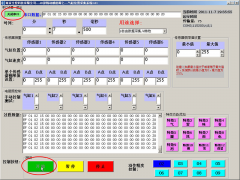
多功能動(dòng)態(tài)模擬訓(xùn)練平臺(tái)配置軟件
2019-10-18
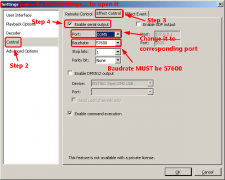
搖擺臺(tái)姿態(tài)輸出軟件( EtherCAT版)
2019-10-18
2019-10-18
注:以上兩個(gè)設(shè)置不能同時(shí)運(yùn)行���,只能二選一
2019-10-18
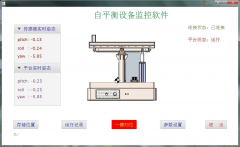
參見(jiàn)《南京全控自平衡控制系統(tǒng)V1.0說(shuō)明書(shū).docx》
2019-10-18
EFFX文件格式轉(zhuǎn)換軟件(VC版)
2019-10-18
EFFX 文件格式轉(zhuǎn)換軟件( VB版)
2019-10-18
2. 11 .1 簡(jiǎn)介 動(dòng)作采集軟件是一個(gè)很重要的軟件����,我們?cè)谇捌陂_(kāi)發(fā)和后期完善的過(guò)程中投入很大的精力進(jìn)行不斷的優(yōu)化����。參...
2019-10-17
 400 025 3599
400 025 3599 










 在線咨詢
在線咨詢 



